Copyright © 2022, William D. Ricker, and licensed CC-BY-SA 4.0
or later ![]() .
.
We get a false sense of accuracy from phone, car, hiking GPS.
“Stay on road” and perhaps inertial corrections let the GPS display cover for the erratic measurements.
If we mark a point with a GPS and then ask for directions to get back there, it likely takes us to the right place close enough, as buildings/driveways are almost far enough apart to be mostly non-overlapping in error. Most people don’t need 1m, 0.1m, or 1cm accuracy.
If you download the “tracks” off a GPS that was left on in a parked car, you’ll see a random “star” as the position computed varies this way and that. A disturbingly large star, that shows that only with a very long term average could you compute a 1m position. My Garmin GPS peering through a windshield-shaped hole with trees and house partially blocking what little sky it could see drew a 50×15m (150×50’) error star for us. If the nearest house-lots weren’t vacant, many of the points in the star if chosen at random (whenever one hits the “save” button) the position wouldn’t obviously be associated with my house! But the centroid of the star-cloud is roughly correct (slightly offset away from the house by i presume reflections).

Native GPS precision/resolution in Civilian mode is 30m; a 5 minute average can improve that to 5m, 12 hours average to maybe 1m? Dual Frequency L1+L2 and DGPS correction signals can improve that slightly, since the ionosphere bends L1 and L2 bands differently, but not by much. Military grade only improves on codeless L1+L2 20%. (They didn’t want us that close but algorithms are winning.)
If one wants to map things smaller than a house accurately, or things hard to see from medium distance away (10-50m) even dual L1+L2 & classical DGPS/WAAS isn’t good enough.
Which is why surveyors use GPS equipment that is capable of correcting for all the errors by using a continuous error stream from a near-by (practically) identical receiver at a known location. (Known to ±1cm preferably.)

These devices cost less than new cars, but I’ve seen used cars for less lately. With a long-term occupation, it can get a ±1cm accurate position on the tripod, and then can share that accuracy with the portable GPS on a surveyor’s rod.
RTK is the latest walkabout form of enhanced GPS/GNSS position solution.
It’s called Real Time Kinematic because it corrects in real time, when moving.†
 (from
wikimedia
© 2022 TS Eriksson - Own work CC BY-SA 4.0
)
(from
wikimedia
© 2022 TS Eriksson - Own work CC BY-SA 4.0
)
In the simplest form, a base station on a precisely known location records phase data on received GPS/GNSS sat signals, both L1 and L2 bands, and notes the corrections - and sends them to one or more rovers subscribers - most simply via direct data radio if nearby, as illustrated. One can insert the Internet (via cellular data in field) and consolidating servers for (a) added complexity (b) only buying one unit.
Subscription may be commercial, open/free, private, or public by e.g. MassDOT, MaineDOT (free, registration required). One can connect to the nearest station of the network by name (having looked up which is nearest) or a network may provide a Virtual base by weighted-averaging several nearest bases to derive a virtual correction for your location instead of just giving the nearest. (This requires disclosing your location to the Network.)
†( Why bother calling it RTK? Because there is an alternative phase-difference enhancement scheme, requiring same high-end GNSS receiver hardware, that is non-real-time, non-kinematic, that compares logged received phases - logging for 12+ satellites in both L1 and L2 bands - at both a known base-station and an unknown station, logged over many hours, unmoving, with the log comparison and calculation done later to get just one (nearly) perfect location solution for the unknown base. Can be < ±1cm if close enough to the known base which was already known that well. This is great for professional surveyors setting up a chain of known positions extending from the nearest public base for their future use in their remote territory, moving their own base unit around. There’s also a compromise that doesn’t use Internet or data radios, so is not real-time but is still kinematic: One can also log raw data while moving around and capturing approximate GPS points, and compare raw field logs to base logs later, back in the office, to get corrected positions for the points collected in the field. )
Hardware solution that is partly Open Hardware

ESP32 is a feature-rich MCU with integrated Wi-Fi and Bluetooth connectivity for a wide-range of applications»,
perfect for IoT and connectivity of larger devices; programmable like an
Arduino but also by other embedded-development-tool-chains.Product
Warning - If you’re used to GPS being inclusive complimentary in your phone, standalone GPS prices will be as staggering as real camera prices - like high end phone without carrier subsidy. These are still nickel-to-dime-on-the-dollar compared to Professional Surveyor packaged equipment that likely uses the same receiver chip.
RTK Express
Plus Kit - everything but the pole, tablet, and clamps. 

now available caseless ui-less with budget antenna too ( blog product)
SparkFun RTK Express Hookup Guide includes nice tour of the case and board (guide for both Plus and original)
Experiments
kit: added recommended phone clamp, a tablet clamp and a
carbon-fibre photo monopod i had on-land, and the Cellular/Wi-Fi
AccessPoint i normally use, and voila 
test run: hike around a park in Boston, using MAINE live
correction data (sub-optimal but it worked).
Note how closely to the path/sidewalk the track stays; marked
points at pitchers mound, porta-potty, stairs, flag-pole, fountain, are
all ±1m. 

first real data collection: family cemetery in Maine, using Maine
correction data (as should there) 
My first expedition is just within 25km radius of the nearest Maine CORS
base-station;
a professional survey outside of radius would need to provide their own
base on a <±1cm mark to achieve cm accuracy.

I geo-referenced the WPA map of the
cemetery in GEarth(Pro). (I need to learn to do that in QGIS.) And
then set markers for known ancestors (and a few select Uncles+Aunts)
using Plot Numbers from FindAGrave.com.
Note This WPA map is North right, viewed from road,
downhill, as will be a couple screenshots, but then we will switch
North up.  I loaded the resulting KML file (including
sketched traces of the driveways) into SW Maps as a reference layer, and
created empty “stones” “photos” layers. I added a “plots” layer in the
field when i used the GPS to draw a polygon around corners of most
recent family plot.
I loaded the resulting KML file (including
sketched traces of the driveways) into SW Maps as a reference layer, and
created empty “stones” “photos” layers. I added a “plots” layer in the
field when i used the GPS to draw a polygon around corners of most
recent family plot.  The red
Google-Maps-ish markers are the KML look near here markers (and have
text of who if clicked).
The red
Google-Maps-ish markers are the KML look near here markers (and have
text of who if clicked). 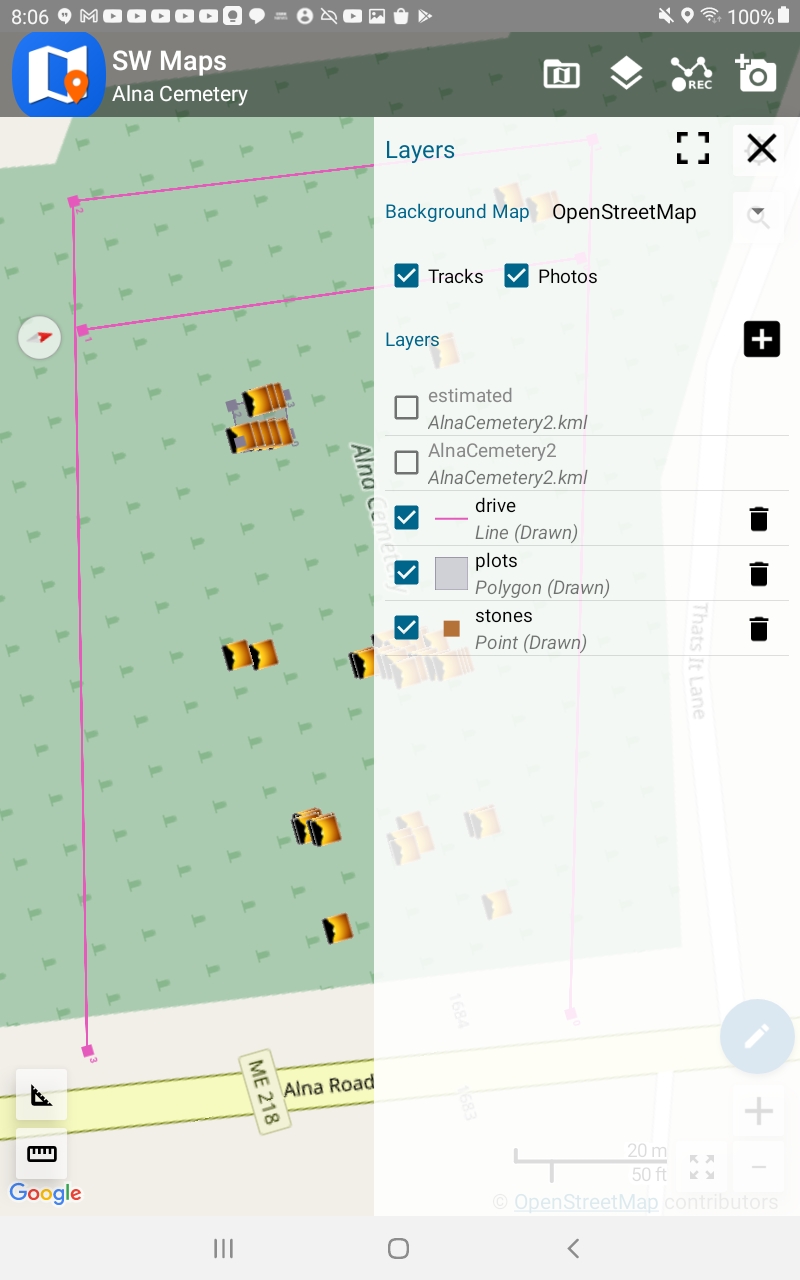 The sunset
icons show where a photo was gathered. Track isn’t currently showing on
this view.
The sunset
icons show where a photo was gathered. Track isn’t currently showing on
this view.  My camera’s GPS was logging as
i walked also. Let’s compare the precision. Red Points on a dusty-rusty
line are the normal GPS track points, connect the dots. Bright blue line
is the RTK ground track. On a few loops, the regular GPS Track tracks
the RTK track reasonably well if crudely, but others are just
whacky - at no point did i jump the fence or even cross the drive north!
My camera’s GPS was logging as
i walked also. Let’s compare the precision. Red Points on a dusty-rusty
line are the normal GPS track points, connect the dots. Bright blue line
is the RTK ground track. On a few loops, the regular GPS Track tracks
the RTK track reasonably well if crudely, but others are just
whacky - at no point did i jump the fence or even cross the drive north!
 Here the red-dots are from the
Photo layer. At each headstone, i took a PHOTO using not my camera but
using the SW Maps program on the
tablet, which not only geotagged the photo at high
precision, it included it in the Photos layer of the GIS project. Here
we’ve imported the Photos layer together with the planning layer. Some
of the stones are rather far from their plan point, but those could be
funny-shaped larger plots. (Or bad metadata in grave index.) Note how
far the highlighted red dot (Nathaniel Plummer in right hand detail
panel) is from his plot marker.
Here the red-dots are from the
Photo layer. At each headstone, i took a PHOTO using not my camera but
using the SW Maps program on the
tablet, which not only geotagged the photo at high
precision, it included it in the Photos layer of the GIS project. Here
we’ve imported the Photos layer together with the planning layer. Some
of the stones are rather far from their plan point, but those could be
funny-shaped larger plots. (Or bad metadata in grave index.) Note how
far the highlighted red dot (Nathaniel Plummer in right hand detail
panel) is from his plot marker.  This is
one of the 3 pictures taken for Nathaniel Plummer and wife.
This is
one of the 3 pictures taken for Nathaniel Plummer and wife.
Caveats
Glossary
{kind=link}